long range drone DJI Phantom 3 professional

This professional article is concerned with the flight range of the "DJI Phantom 3 professional". The formulas and calculations are universal and can be used for other hexacopter, oktocopter and helicopter. Drone be increasingly used for transport and logistics tasks. But which flight range has a quadrocopter actually?
This professional article is calculated by scientific methods, the maximum range and other flight data as motor power, wind resistance and aerodynamic features. This article is not about the maximum range of the remote control, but at the maximum flight range or flight radius of the drone.
Limits for long range flights with drones
To determine the maximum flight range of the drone it is important to know the limiting factors. These are:- battery capacity
- Take Off Weight
- Drag and aerodynamics
- Efficiency of the propulsion system
Following consideration suggests that there is an optimal flight speed:
- If the drone is flying slowly away most of the energy is required for hovering. The air resistance of the drone does not matter.
- Does the drone flying very quickly outweigh the drag. The force of air resistance increases with the square of airspeed. The necessary power to the third power. A twice as fast flying drone needs about 8 times the motor power. This is incidentally also apply to a car or airplane.
In case 1, the most power for hovering is required and in case 2 for overcoming the air resistance. Somewhere in between there will be an optimum airspeed for maximum flight range.
Calculation of power for hovering
The power consumption are investigated sufficiently accurate for the hover. There are many practical measurements of diverse drones and their propulsion systems. The power requirements for hovering is an easy measured value. Either a power meter in flight or after a prolonged hovering the spent battery power is measured. These can be found for example on the charger.

I_charger * t_charger are in the above example 2 Ah or 2000 mAh.
Formula for power in level flight
The energy requirement for the drone to keep in the air rises for the drone with increasing airspeed. Not only the flow resistance has to be overcome and costs energy. Another special feature is added in a typical drone because the shape is aerodynamically effective from a certain speed.depression due to the shape
The DJI Phantom 3 professional and similar drones are constructed rather flat. Like a board that move through the air. Is the board aligned parallel to the ground while hovering the horizontal air resistance is very low. If you as usual initiate forward flight with a drone by steer the nose down of the board the thing looks different. The board is aerodynamically efficient and acts like the elevator of an airplane. The consequence is that the Quadrocopter is pressed further downwards.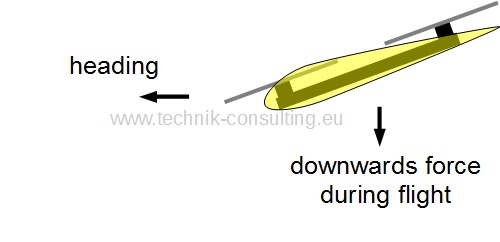
Sketch how the extra force produced downwards. Yellow an airfoil is schematically shown, which represents the drone.
Most Copter pilots know the phenomenon if the drone is placed at high speeds on the other side. The drone rises, although the angle to the horizontal is perhaps the same, only on the other side. Experienced pilots take back the throttle at the low altitude shortly before tilting , so that the drone turns on a line and does not rise. FPV pilots (First Person View) who are traveling at high speed take intuitively at the "brakes" or tilting the throttle down.
Formula for calculating the downwards force by the shape
The drag coefficient and the cl-value (lift coefficient) change with the angle Alpha (hover corresponds to 0 °, the maximum forward flight 90 °). The change in the cw-value with the angle of attack can be neglected. The drag coefficient is a measure of how streamlined the drone is. Small cw values featuring a streamlined drone. The cl-value describes how much the lift or downforce. The larger the cl-value, the more.The following approximation formula is used for further calculation:
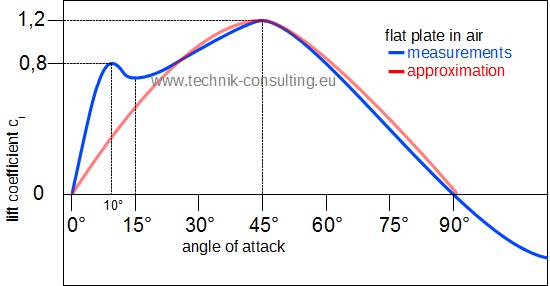
In the diagram is recognizable that exist with the approximation formula between 0 ° and 20 ° large variations to measured values. The cause lies in the transition from laminar flow to turbulent flow at low angles with larger angles from about 10 °. The air resistance and the risk of a stall rises sharply at larger angles. For this reason, control pilot airplanes so that the flow in the laminar range remains. Aerobatics exception. With a drone the structure is often interrupted and does not correspond to a continuous wing. The flow is also the flow of the propeller turbulent, so the approximate formula is also suitable for small angles of attack.
With a drone it does not matter whether a stall occurs on the body. A drone requires no wings with laminar flow (except for the propeller) to stay in the air. The aerodynamic surfaces are at a drone mostly disadvantageous. Also the total area which "sees" the wind varies with the angle of attack.
The surfaces can be determined well over photos and image processing applications. Using the example of "DJI Phantom 3 Professional" I will show you the procedure.
Take a photo from the top and cut the propeller via software away. Measure out a will known dimension in pixels. I have used the diagonal propeller distance. This is 356 mm. In the high-resolution sample image, these are 2011 pixels. Thus, one pixel corresponds to 0.177 mm. Remember this value.

You then edit the picture (for example, with the brightness and contrast) to the surface from the top is white and the rest black.
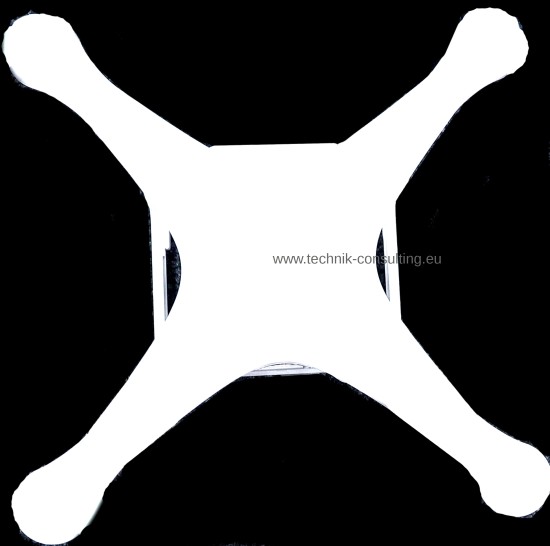
This is the projected area from above. In the histogram, you can determine the number of white and black pixels. In the high-resolution sample image 975 265 white pixels are included. A pixel corresponds to an area of 0.177 x 0.177 mm2 = 0.031 mm2. Multiply this value by the number of white pixels and you have the space. The projected from the top surface of the 'DJI Phantom 3 professional "is 306 cm2.
A typical drone is pushed downwards at high speeds. The drone acts like a small wing or an elevator and pushes the drone down. This downwards force can be approximately calculated with:
Rho: density of air. At sea level at 20°C approx. 1,2 kg/m3.
c_l,0 is the maximum value that the drone with the projected top surface A_top can reach. On a flat plate is the lift coefficient c_l about 1.2.
Additionally required engine power because downward force
In order to compensate for this downward force following engine power required in addition:
The drone should not only apply to the downward force the corresponding power to stay in the air. Also the flow resistance must be overcome. Eta_thrust is in unity "power per watt".
Calculating engine power due to air resistance
After the power for the hover and the power was considered to overcome the downwards force, the power consumption will be determined with respect to the air resistance in isolated manner. We are talking here only about overcoming the air resistance. With a normal airplane the air resistance can be quite easy calculated on the relationship between surface drag coefficient and speed.
With a drone this is not quite as simple as changing the surface at zero incidence. A slow flying drone is only slightly tilted. Therefore mainly shows the narrow side in the direction of flight.
"DJI Phantom 3 professional" without gimbal, camera, landing gear and propeller. This would be the minimum projected area of the front. The propellers are not taken into account and are therefore removed. This drone now has a lower air resistance by 32% compared from top.
Measured this area is 105 cm2. The surface of gimbal, camera and landing gear is about 34 cm2.
At high airspeeds and large tilt angles, showing more and more of the top in the direction of flight. For most drones, therefore, increases the area.
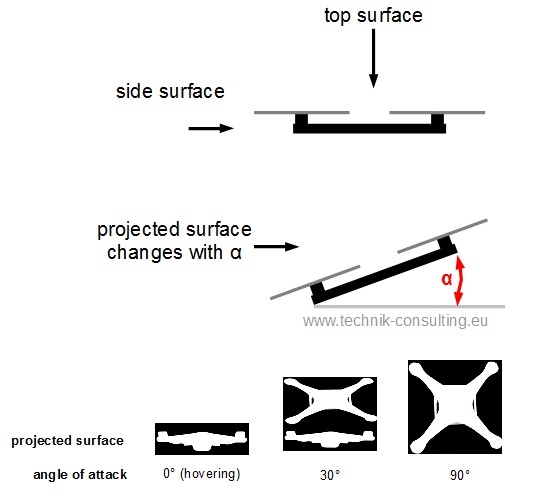
A_side: This is the side surface of the drone
A_top: This is the top side of the drone
This formula describes the projected area in the direction of flight. This allows the power state to overcome the flow resistance:

This is the power with an efficiency of 100%.
The Cw value also varies with the angle depending on the drone. This is not considered further here. It is a medium drag coefficient used in this professional article.

To get the real power needed to overcome the air friction or air resistance, the efficiency of the propulsion system must be included. This varies with airspeed which is not considered in this professional article for simplicity. Typically the efficiency of the propulsion system is located at higher speeds at about 60%.
Total output at high airspeeds
To calculate the total power all individual powers are now calculated by appropriate formulas. The isolated partial powers are:- additional engine power because downwards force
- air resistance
- hovering
The formula for the total power is obtained thus:

To calculate the formula must be known the angle alpha at speed v. You guessed it. Again, this can be calculated.
drone angle of attack in flight
Will the forces considered into the flight of a drone, so the following picture emerges: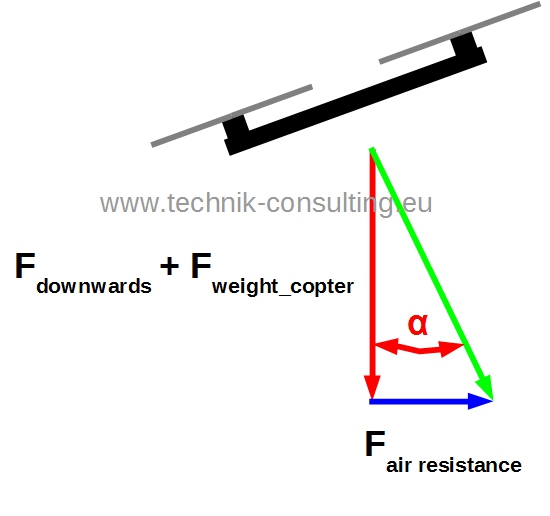
Sketch of forces during flight.
Flight leftward direction.
F_weight_copter corresponds to the weight of the entire drone (m * g).
The angle alpha can be determined on the tangent.
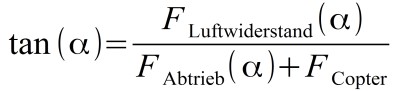

This formula looks more complicated than it is. It is important to recognize that the formula for the angle of attack during flight only v and alpha has as unknown valuess. All other variables are known. This allows the function of alpha calculate opposite v.
Calculation of data by algorithm
In order to obtain the required values the following algorithm is applied.- Alpha is set with a start value (for example, 0°)
- v will determined
- With Alpha and v can be the overall power for that flight condition calculate
- Alpha increase by 1° and back to point 1, until Alpha has reached 90 °.
Results for the maximum flight range of a drone
With the above formulas the foundation has been laid to calculate the following data of a drone:- Tilt angle as a function of speed
- Power depending on the speed
- Maximum range in flight
Tilt angle "DJI Phantom 3 professional" depending on the speed
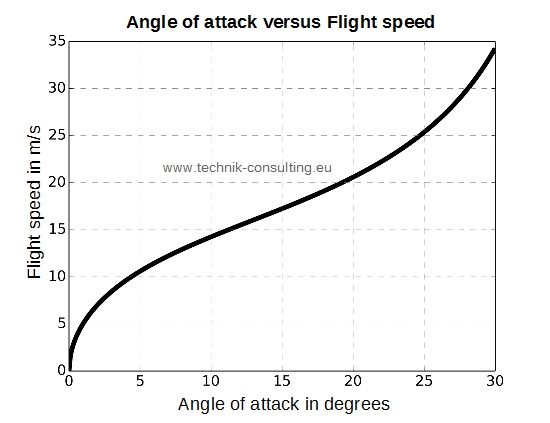
The airspeed increases sharply from a tilt of about 20 degrees.
„DJI Phantom 3 professional“ total propulsion power
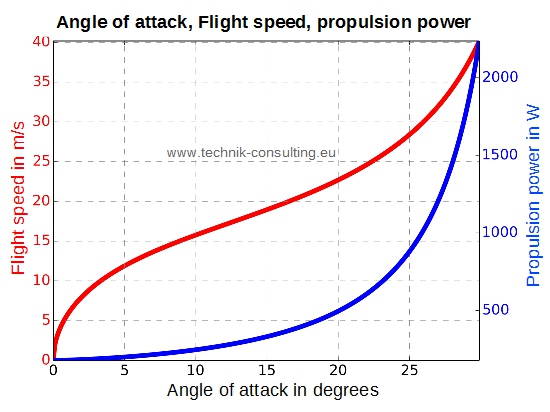
The blue curve represents the required propulsion power in airspeed (red curve). Below is plotted in the graph of the angle of attack or angle of tilt. The "DJI Phantom 3 professional" has a maximum engine power of 400 W. Therefore a flight speed of about 17 m/s is possible.
At an angle of 12° relative to the hover reaching "DJI Phantom 3 professional" a speed of 15 m/s. This represents 54 km/h.
„DJI Phantom 3 professional“ propulsion power – itemized
The total propulsion power as a function of airspeed is known. The individual powers are presented in order to obtain a better overview of where the drive energy is consumed.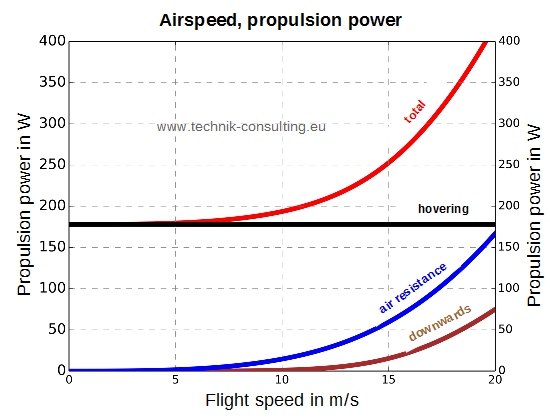
The aerodynamic drag and downwards force will make a significant contribution to the total consumption at higher speeds. Optimizations in this area are only required if speeds exceeding 10 m/s (36 km/h) are permanently flown. Most of the energy is consumed for the hover. For long flights at low speeds so is to optimize the hover.
„DJI Phantom 3 professional“ maximum flight distance
What maximum flight distance can the drone "DJI Phantom 3 professional" provide? With the formulas above the calculation can carried out.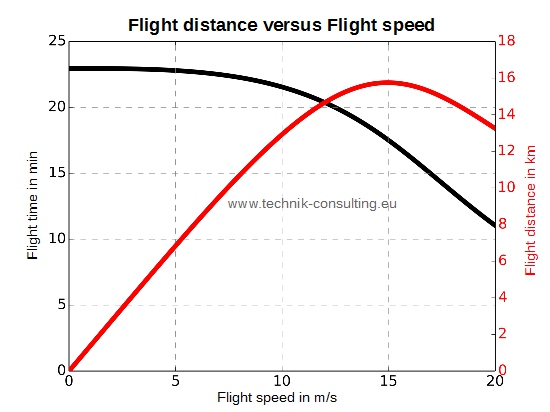
The faster the "DJI Phantom 3 professional" is flown, the lower the flight time. This relationship is plausible, since additional energy to overcome the air resistance must be applied. Since the power to overcome air resistance as the cube (high 3) increases (double speed ? 8 times the performance) the speed is limited. If the drone flies very slowly, most of the battery energy is consumed for the hover. For a long distance flight not optimal.
The red curve in the diagram represents the maximum range that can cover with a standard battery of "DJI Phantom 3 professional". The maximum flight range is about 14 m/s and corresponds to 50 km/h. Thus, the developer of DJI have useful set limiting the maximum speed of 16 m/s. Higher speeds would reduce the range significantly.
At the optimum cruising speed of "DJI Phantom 3 professional" of about 14 m/s the estimated flight time is 17 minutes and the maximum range is over 14 km away.
Optimization of long range flights "DJI Phantom 3 professional"
If the Gimbal and camera are removed the maximum flight range is 16 km. This corresponds to a distance gain of 14%.If you develop drone and need help with the design of the components and optimization, so you can talk to me.
To make this professional article clearer among other things the following are not included:
- The power for the hovering flight varies with the speed, since the efficiency varies with airspeed.
- cl und ca are depending on the angel of attack.
- The efficiency of the propulsion system varies with airspeed
- In slow forward flight, the power requirements for hovering reduced by the translational lift.

If you need detailed calculations please contact me. For questions regarding the implementation, optimization or calculation of long range flights I am happy to assist you.