maximum climb altitude of a drone
Is a drone suitable for sounding or aerial photography from great heights? Based on theoretical considerations and practical information about the "DJI Phantom 2 Vision" the maximum attainable height is examined with a drone in this professional article. With the maximum range of a drone deals this professional article. Finally optimization opportunities are identified to ascend with a drone to great heights. The core question here is how many vertical meters can rise a drone?
Please observe the relevant regulations. All information without guarantee and without any liability.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Example drone
In order to evaluate the idea of soaring with a drone (or model helicopter) key figures from practice are required. This professional article is as far as possible easily understandable written. For background information and further information see the appendix.
implementation sounding
The drone will operate autonomously in the high-altitude flight. Using GPS it rises vertically above the starting position as far as possible upwards until the battery is almost empty. This is followed by a controlled swoop in which the rotors are slowed down accordingly to a stable flight attitude. This works only with motors with low cogging torque. Energy recovery is possible. Shortly before the ground the model is intercepted and landed safely. That's the theory.Technically limiting factors from such a high-flying drone are:
- Decrease in air density with increasing altitude. Propellers must rotate faster and the maximum speed of the propeller (or motor / controller) is reached
- battery capacity
- ambient temperature
- total efficiency of the model
- weight
Air pressure and propeller speed
The air pressure decreases with altitude, so the speed of the propeller must be at the same thrust, increased (see derivation 1 in the Annex).The higher the model aircraft increases, the faster the propeller must turn. This means that a propeller that rotates at sea level with 8000 revolutions per minute, in 2000 meters altitude above MSL (mean sea level, height above sea level) with 9120 U / min must rotate to generate the same static thrust (easy viewing without temperature influence ). The speed of the propeller can not be arbitrary increased, otherwise the propeller is damaged. Motor and controller also have a maximum speed. The relationship between propeller speed and air pressure can be seen from the chart 1. Key data of height airworthy drone in Table 1 below.
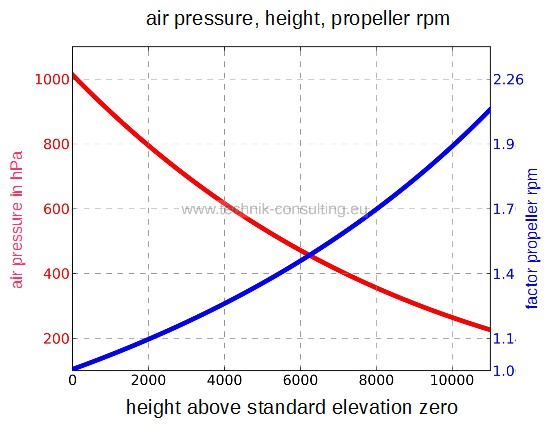
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 1 - air pressure, height, propeller_rpm
| value | example drone | DJI Phantom 2 Vision |
|---|---|---|
| boost efficiency ?boost | 4 g/W | 4 g/W |
| take Off Weight m | 2,5 kg | 1,16 kg |
| drive input power | 4 x 600 W | 4 x 140 W |
| battery technology | LiPo | LiPo |
| number of cells | 6S (22,2 V) | 3S (11,1 V) |
| battery capacity | 4,9 Ah | 5,2 Ah |
| energy content battery | 391 kJ | 208 kJ |
| battery weight | 750 g | 367 g |
| drag coefficient | 0,9 | 0,9 |
| effective flow area A | 0,04 m2 | 0.026 m2 |
| system efficiency ?system | 30% | 30% |
table 1 - height airworthy drone
optimum rate of climb
Following consideration suggests that there is an optimum rate of climb (climb speed) for a drone:- At the hover battery energy is not converted into height.
- In a very rapid ascent of the air resistance with the climb rate increases squarely strong, whereby a lot of energy to overcome the air resistance is required. The power increases with the cube!
To be able to answer the question of the optimal rate of climb it is necessary to consider a drone mathematical / physically closer.
propeller thrust
The thrust force which can generate by a propeller can be determined using the following formula: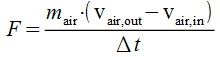
efficiency of climb performance
The efficiency for the climb performance is determined by: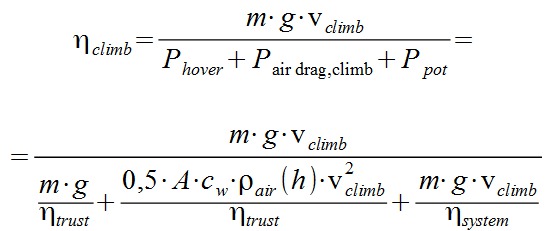
The larger ?climb is, the more efficient the (battery) power is converted into height. The relationship between efficiency, rate of climb and altitude can be read from chart 2 in our sample drone.
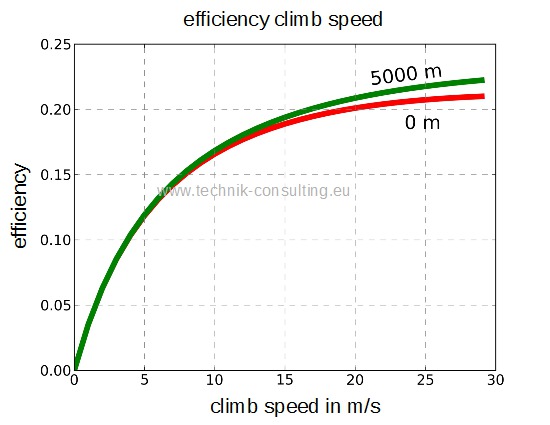
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 2 - efficiency of climb speed and NHN
With increasing height the air resistance decreases as the air density decreases. The air resistance thus is less important which is why increases with increasing level of efficiency. From the graph 2 can be seen that at low rates of climb, the efficiency is considerably waning. When hovering (climbing speed = 0 m / s), the efficiency of the climb performance is expected to be zero because no amount of height is gained.
the optimal rate of climb
With the help of mathematics can be the optimal rate of climb of ?climb calculated as a function of height. See chart 3.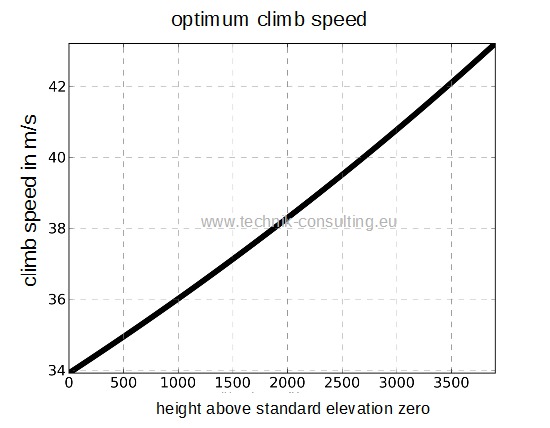
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 3 - optimum climb speed
The climb rate in order to remain in the optimum efficiency is enormous. At sea level this would be a vertical climb speed of 120 km/h at our example drone. The optimum climb speed for the "DJI Phantom 2 Vision" are around 100 km / h. According to the manufacturer the model provides a maximum climb speed of 22 km/h. Thus the model can not climb with optimum efficiency.
required motor power for the optimal rate of climb
The necessary engine power for the example drone to maintain the optimum rate of climb is visible from chart 4.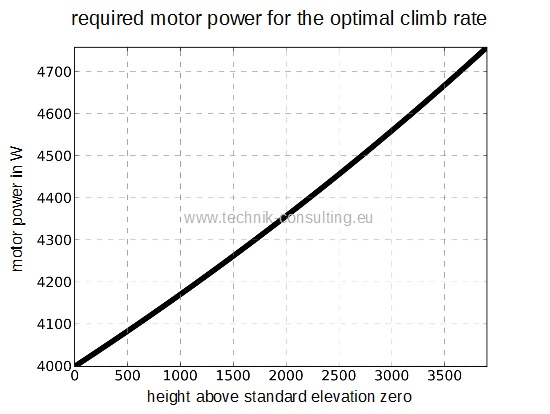
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 4 - required motor power depending on the height
Our sample drone has a maximum motor input power of 2400 W. This is not enough to allow a climb with optimum efficiency. However the efficiency only breaks at low rates of climb significantly. With 2400 W our model creates a function of the height of the climb rates like chart 5.
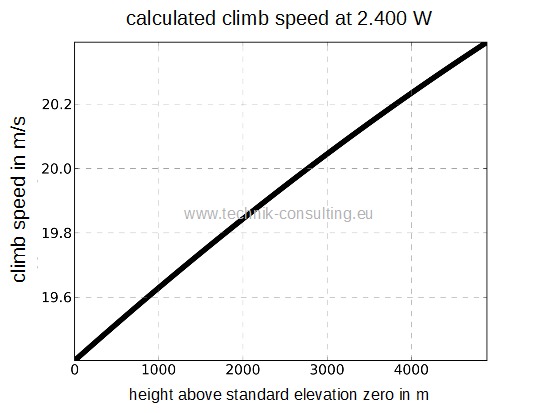
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 5 - climb speed example drone at 2.400 Watt
The model moves with 2.400 W motor input power is not in the optimum climb rate range of 34 m/s at sea level but reaches 19 m/s at sea level. The efficiency of converting the battery energy in height thus falls from about 22% to about 20%.
The "DJI Phantom 2 Vision" has a maximum of 560 W motor input power. The computed climb power at sea level is (chart 6) with this engine at about 6.8 m/s. Optimal would be 29 m/s. The efficiency of the "DJI Phantom 2 Vision" order decreases from about 19% to about 13%.
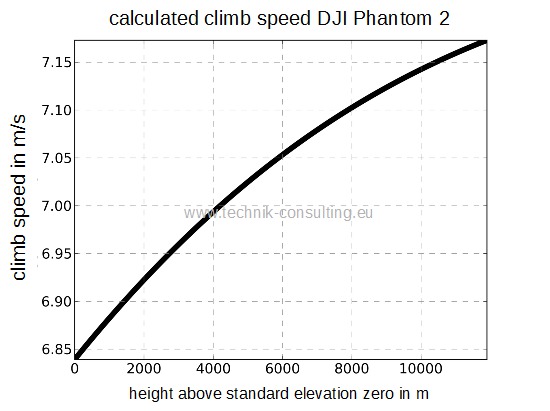
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 6 - climb speed DJI Phantom 2 Vision
Outflow velocity at the propeller
The maximum climb rate is limited by the combination of propeller pitch and speed. As a result corresponding outflow velocity at the propeller as in chart 7 can be seen.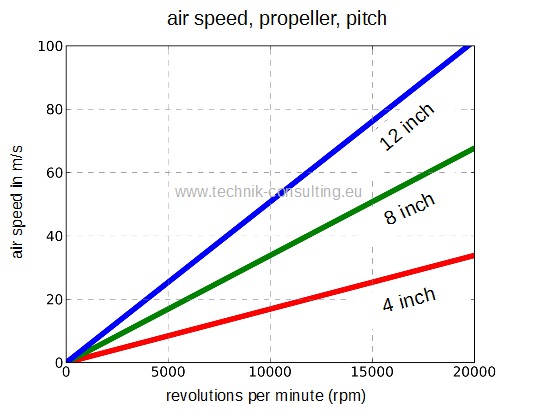
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 7 - air speed at the propeller
In reality, the air speed is about 10% less than indicated due to flow losses. The air flow produced by the propeller must be significantly faster than the rate of ascent of more than 70 km/h (19 m/s). The pitch of the propeller should therefore be at least 8 inches at a speed of about 8000 1/min.
maximum climb height
The energy content of the batteries of the example drone is 390 kJ and of the "DJI Phantom 2 Vision" 208 kJ. As the model for the descent and the interception near the ground requires more energy there are about 350 kJ and 180 kJ available for the climb. If at the descent via the propeller energy is recovered even more battery power can be used for the ascent.The example drone can climb from sea level to about 2800 meters above sea level (chart 8) and take for example aerial photographs. The "DJI Phantom 2 Vision" could climb 2300m (chart 9).
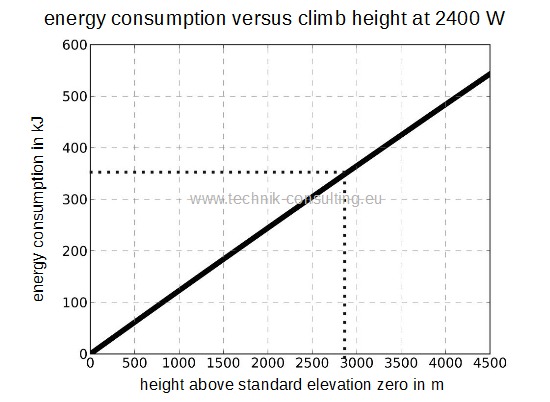
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 8 - energy consumption versus climb height of the example drone at 2400W
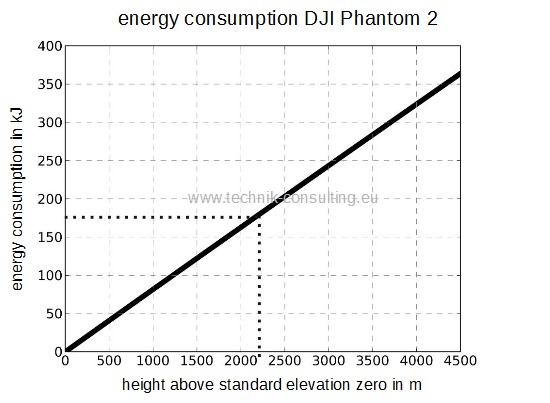
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 9 - energy consumption DJI Phantom 2 Vision
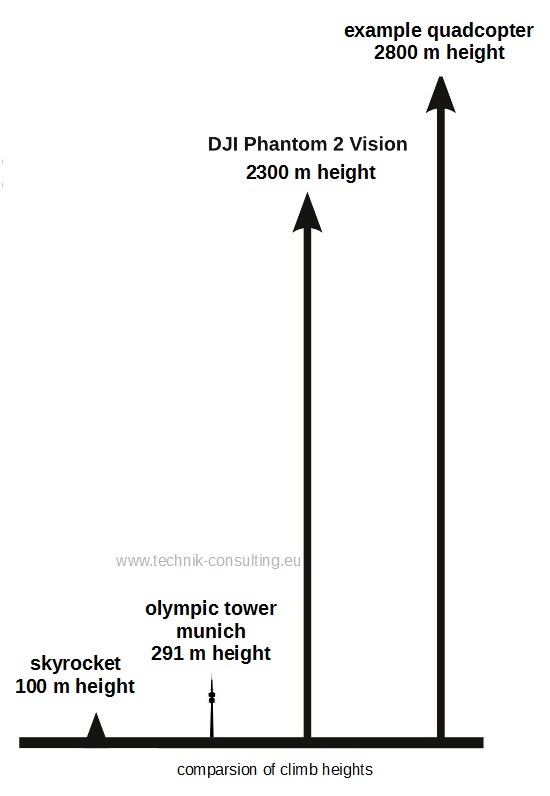
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
comparsion climb heights.jpg
climb time
To climb into this height about 140 seconds (chart 10) or 320 seconds (Chart 11) for the "DJI Phantom 2 Vision" is required. Thereafter the battery is almost empty.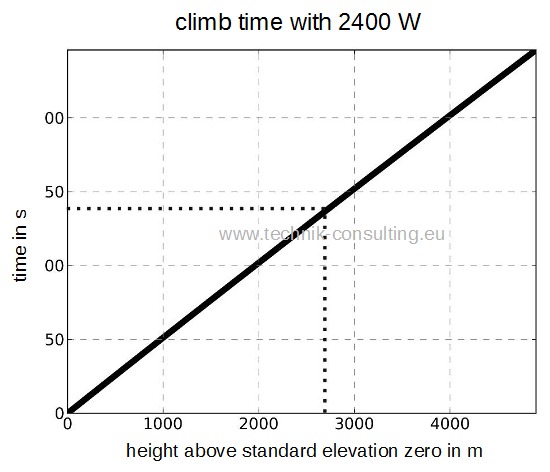
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 10 - climb time with 2400 W for the example drone
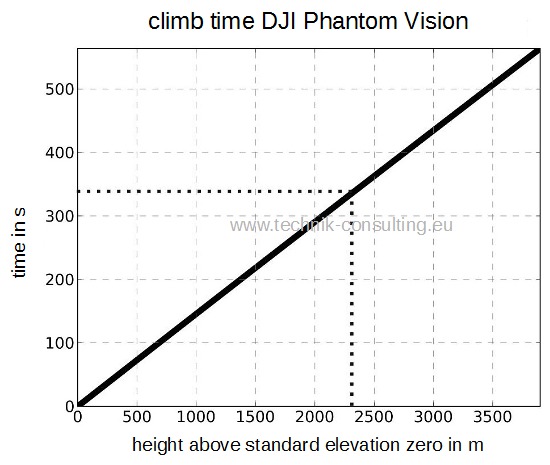
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
chart 11 - climb time for the DJI Phantom Vision
flight data of the drone
Data of flight with for the example drone and the "DJI Phantom 2 Vision" are in table 2 below.| value | example drone | DJI Phantom 2 Vision |
|---|---|---|
| maximum height above NHN in m | 2800 | 2300 |
| climb time in s | 150 | 310 |
| maximum power in W | 2200 | 540 |
| battery energy at maximum height | 10% | 10% |
| current during climb flight in A | 100 | 50 |
table 2 - flight data
| value | max. height above NHN in m | gain in height in m |
|---|---|---|
| example drone | 2800 | 0 |
| example drone 10% less weight | 3200 | +400 |
| example drone 10% better drag coefficient | 2900 | +100 |
| example drone 10% better ?trust | 3000 | +200 |
| example drone 10% better ?system | 3100 | +300 |
| example drone 10% less reference area | 2900 | +100 |
| highly optimized drone | 4700 | +1900 |
table 3 - optimized drone
optimized drone
The technical data of an optimized drone are shown in table 4. This drone could climb up to 4700 m above mean sea level.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
optimized drone
| value | optimized drone |
|---|---|
| drag coefficient ?trust | 5 g/W or 0,05 N/W |
| take off weight (including payload) m | 2,0 kg |
| drive continuous input power | 4 x 600 W |
| battery technology | LiPo |
| number of cells | 6s (22,2 V) |
| battery capacity | 4,9 Ah |
| energy content battery | 391 kJ (94 kcal) |
| battery weight | 750 g |
| drag coefficient | 0,5 |
| reference area A | 0,04 m2 |
| system efficiency ?system | 35% |
| maximum climb height | 4700 m above mean sea level |
table 4 - optimized drone
conclusion
With the example drone a maximum altitudes of over 2000 m height are possible. At this altitude can already make impressive aerial photographs. A specially designed drone could climb to almost 5000 meters above sea level. Such drone may be widely used in future for- the simple and cost effective exploration of the lowest troposphere.
- cartography and aerial photography
- transport in the mountains (eg medication or emergency rations for mountaineers in distress)
What other operations are possible the future will tell.

For questions regarding the implementation, optimization or calculation of climb flights I am happy to assist you.