ESC motor controller test stand, analysis for quadcopter
In order for a quadrocopter to remains stable in the air several conditions are required. Among other things the propulsion system (motor controller or ESC, motor, propeller) has to be accurately and quickly. It has to work perfect together with the Flight Controller (FC). Whether long range flight, height altitude flight or just for fun.
If the propulsion system (propeller, motor, motor controller) is too slow or inaccurate a quadcopter can not keep in the air. The model crashes. To check the motor controller (ESC) of a quadcopter under realistic conditions a corresponding test stand is necessary. ESC is the abbreviation for Electronic Speed Controller.
The motor test stand for an outrunner
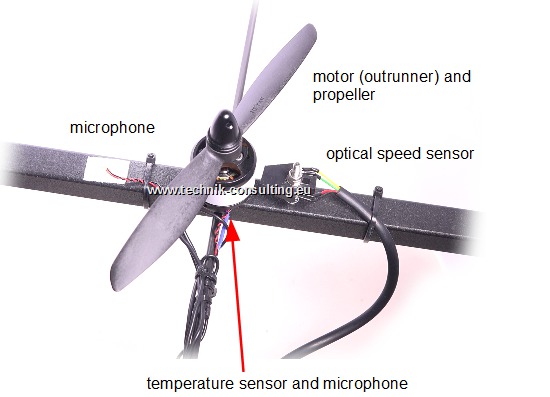
placed sensors an the motor test stand
For data recording the following sensors are available.optical speed sensor on the motor
At the motor or the air screw mounting there is a light/dark marking which is scanned by a photocell. This signal is amplified. It was intentional to use no speed sensor which operates directly by scanning the motor pulses. The motor may lose steps and this would not be noticed.temperature sensor in the coils or windings
There is a small NiCr-Ni-thermocouple with a measuring amplifier to the coils of the motor. In addition there are further NiCr-Ni thermocouple on the motor controller or ESC and the battery.microphone into the coils or windings
In the motor there is a small microphone. About this the operating noise will be recorded. Bearing damage can be also detected.current measurement with the Hall effect
The current flow to the motor or by the motor back (during braking) is detected by a current sensor with high resolution and sampling rate. It is a current sensor that utilizes the Hall effect. The result is no voltage drop as when using a shunt.Voltage measurement with precision resistor network
The battery voltage is measured via an A/D converter. The voltage of the battery is adapted with a precision resistor network to the measuring range of the A/D converter.control electronics motor test stand
The control electronics sends corresponding control pulses to the motor controller. About the speed change can be detected directly such as the ESC and the motor controller react. All this under almost real conditions with engine, propeller and LiPo battery.special features of the test setup
The data are collected with a high data rate in the microsecond range. Thus the data can be compared the time base of the data record is synchronized with the drive pulses. Just as the jump in the drive signal.safety arrangement motor test stand
In the event of cases, several safety devices are on the motor test stand.- emergency switch which should be held in the hand. When released an immediate shutdown of the drive occur.
- overcurrent protection. If the fuse blows the entire motor circuit is without energy. The measurement is continued in order to detect any further temperature increases.
- over temperature protection. When overtemperature is detected the test is immediately terminated and carried out the emergency procedure. The temperature is measured at the motor coil, the motor controller and battery.
test program motor test stand
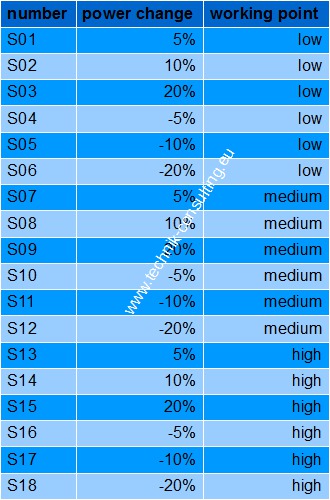
The test program should be as close to reality. For this reason the following scenarios are used:Operating points of the propulsion system during the test
(power with which the engine is operated.)- low power (corresponds to a descent)
- medium power (corresponds to a hover)
- high power (corresponds to a climb)
Deviations from the operating points
(or power change)- ± 5 %; This corresponds to a typical closed-loop control in hover with no wind.
- ± 10 %; This corresponds to a typical closed-loop control while hovering in some wind.
- ± 20 %; This corresponds to a closed-loop control under difficult conditions eg stronger wind.
Step responses of the propulsion system
The test cycle is as follows:- Bring the engine to low speed.
- Bring engine to the operating point depending on the scenario.
- Wait briefly until the engine has reached safe the operating point.
- change the motor power depending on the scenario. The recording data is synchronized with the drive pulses of the controller.
- Continue to record data until the step response of the drive system has settled.
- Next are through with point 1 to all scenarios.
In total 18 test scenarios are run through. The motor is always under a medium or low load when changing the scenarios.
If required the scenarios can be adjusted as desired. It can be measured pulses, various jumps, ramps and vibrations in the drive signal. For an initial characterization of the propulsion system however the step response has proven itself with the 18 scenarios.
Here are a few charts of different propulsion systems. The two propulsion systems differ only by the motor controller or ESC. Propeller, engine and battery are the same. The battery charging status is also the same. The speeds are not identical, since each motor controller has a little different characteristic curves.
Some selected controller and measurement curves are discussed next. It concerns with the motor controllers to the UltraESC 20A and the JETI HiCopter 30 opto. Versions of May 2015th
The motor is a 2208 outrunner with a 6 inch propeller with 4 inch pitch.LiPo battery with 2S was used.
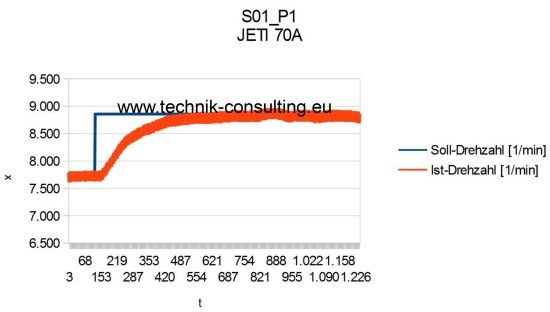
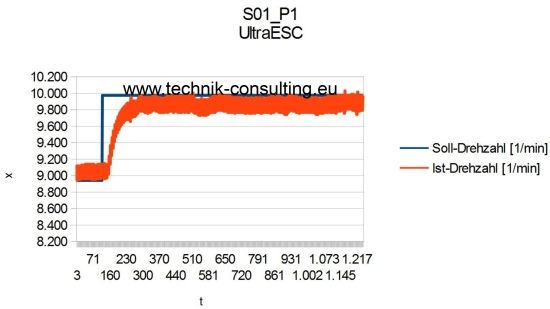
Low engine power for descent
S01 +5% changeThis scenario is important for a stable descent. For the ESC or motor controller and motor, the reaction time is usually due to the low rotational speed slightly slower than at higher rotational speeds.
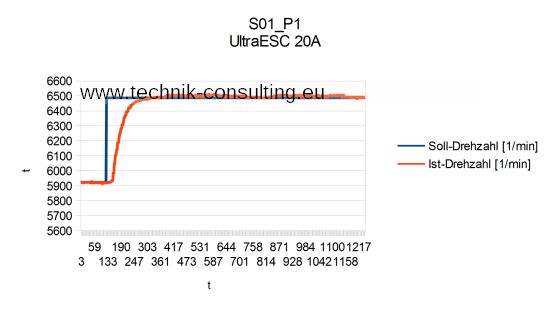
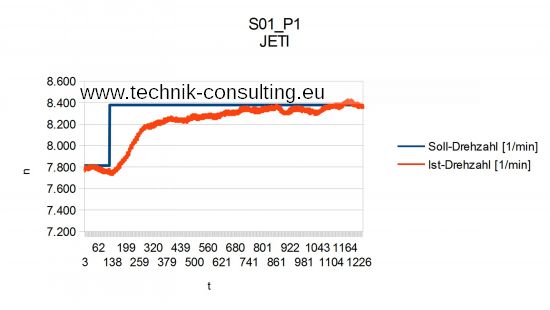
The controller shown in the diagram above regulates cleanly and quickly to the setpoint. In the controller shown in the lower chart it shows a slow control. The speed reduction at this motor controller straight down the rest of the jump caused by an bad control with vibration earlier. The controller tends to oscillate slightly. A quadcopter with this ESC will have a little bit unstable descent. For the scenario S01 (descent with minor changes), the motor controller shown above is definitely better.
medium engine power for hovering
S08 +10% changeThe scenario S08 is important for a stable hover in light winds. The faster and more accurately the motor controller (ESC) the more stable is the model in the air.
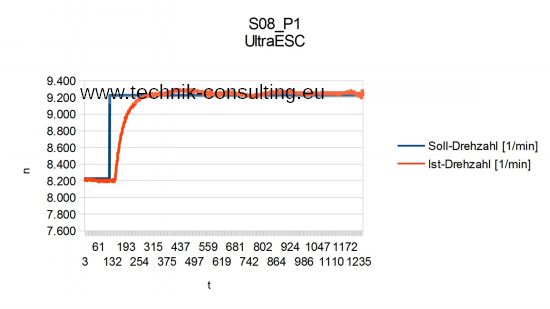
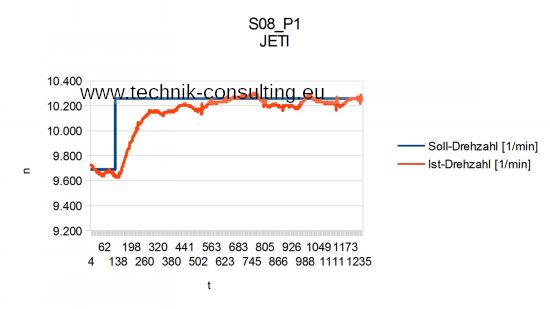
The motor controller shown in the graph above shows a good control behavior compared to the bottom. Both controllers show slight vibrations which, however are more pronounced in the controller shown below. The above measured motor controller is also faster and more precise than the ESC shown below. Keep in mind that during the measurement only the controller has been replaced. The rest (engine, propeller, battery) remained the same.
The upper motor controller appears better suited for a stable hover in light winds.
High motor power for climbing
S18 -20% changeThe scenario 18 (S18 short) is important for a quick climb and a strong regulation by the flight control (FC) example due to strong winds. Here the engine power is to be reduced suddenly at a high level. Here have the motor controller a problem if they can not accurate slow down the propeller.
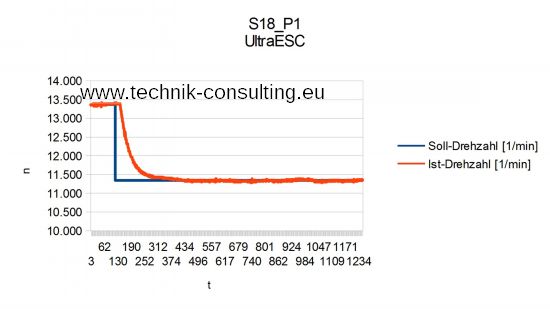
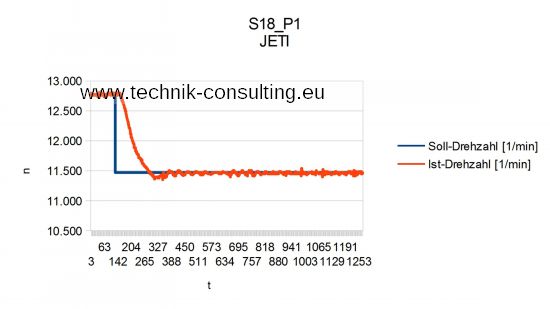
In this scenario the two measured motor controllers are almost equal. The motor controller shown above is somewhat more precise than the bottom measured ESC. In flight both regulators will behave similarly at high power and sudden power reduction. The ESC shown below still shows little oszillations but these are expected to remain virtually invisible in flight under these conditions.
Audio analysis by frequency spectrum and audio spectrogram
Another way to analyze the motor controller is the an audio analysis. The following procedure is useful.- motor firmly clamped in a device (eg a vice with plastic jaws).
- If you want to measure an already built model unplug all motor controllers except one. The easiest way to connect the controller to be tested to a free receiver channel.
- On the remote control use a switch to make the jump to simulate. Alternatively you can use a modified servo tester. In this switch a resistor in parallel with the potentiometer so.
- record the propeller noise.
- after that you analyze the frequency spectrum.
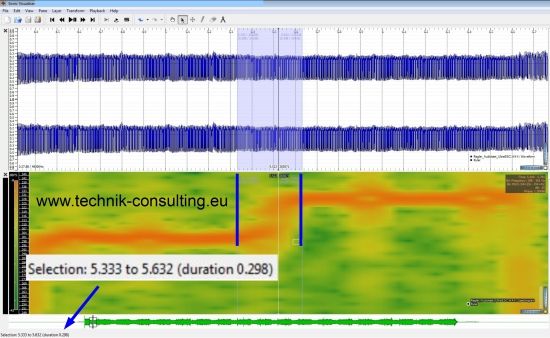
Insert in the program corresponding markers before and after the jump. Measure the frequencies. To come from the determined frequency to the speed, multiply by 30. Have you determined for example 256 Hz this corresponds to a speed of 256 Hz * 30 / (Hz * min) = 7.680 1/min.
[bold | Why 30 times] If you have a 2-blade propeller this per revolution generates 2 signals. To get from Hz (cycles per second) in revolutions per minute, you have to take the value times 60. Short 60 divided by 2 = 30. In a three-blade propeller according to times 20.
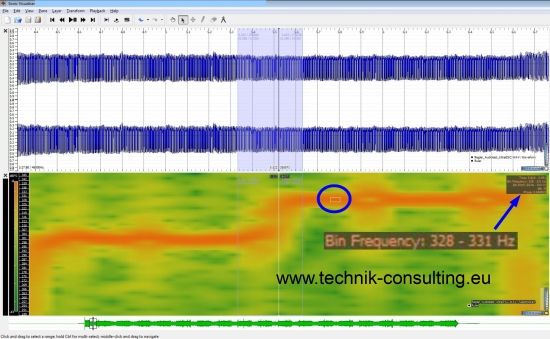
Audio spectrogram (JETI) low motor power for descent
S01 +5% change (with a 3S-LiPo-battery)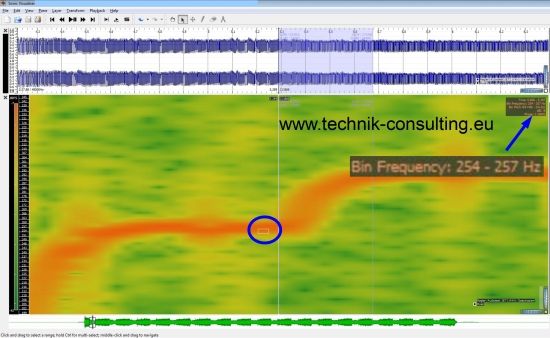
With the values of the motor test stand the audio spectrogram is in good agreement.
Video incl. Spectrogram of the JETI-regulator
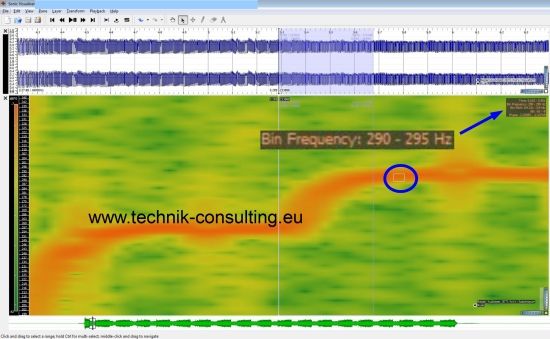
Audio spectrogram (UltraESC) low engine power for descent
S01 +5% change (with a 3S-LiPo-battery)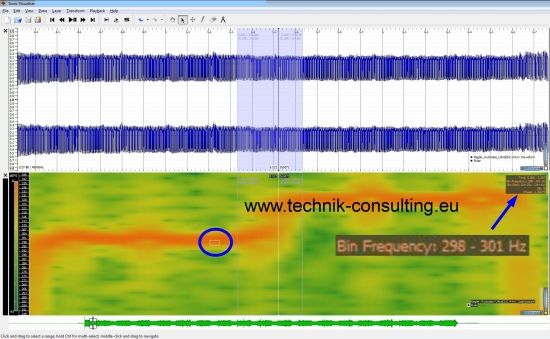
Video incl. Spectrogram of UltraESC 20A controller
With the values of the motor test stand the audio spectrogram is in good agreement.
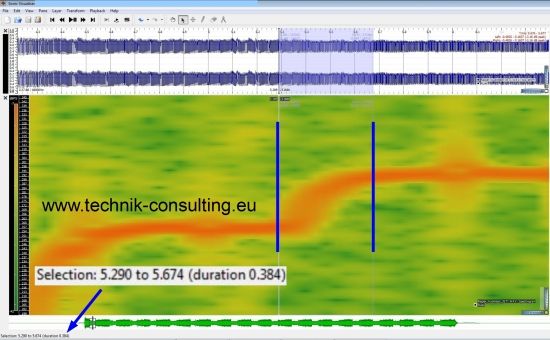
A spectrogram shows how the frequency changes. This is precisely the time it takes for the propulsion unit to arrive at the new speed. Corresponding markers before and after the jump give approximately the regulation time. Note that a possible dead time of the controller with this method can not be detected.
Downside to the audio analysis means spectrogram is the high cost in time and the risk of errors. An advantage is the simple implementation.
Summary of test results for quadcopter motor controller (ESC)
You see how important is a well-selected motor speed controller. Even a very good working Flight Control is unable to keep the quadcopter stable in the air with a bad motor controller. When hovering a quadcopter then acts restless. The ESC is subject to certain limits. The scheme can not be any fast because very high currents would then flow. For this reason the ESC has a small ramp that does not change the output signal abruptly. Optimizing the engine controller is the balance between control speed and current flow.In the measurement results shown here neutral tests carried out.
We can measure and analyze your drive unit or you want to optimize it. Talk to us. We also measured servo motors and model servos.
For further questions, please contact us.