Reichweite Drohne DJI Phantom 3 professional

Dieser Fachartikel beschäftigt sich mit der Flugreichweite des „DJI Phantom 3 professional“. Die Formeln und Berechnungen sind allgemeingültig und können auch für andere Hexacopter, Oktacopter und Helikopter verwendet werden. Drohne werden immer mehr für Transportaufgaben und Logistik eingesetzt. Doch welche Flugreichweite besitzt eine Drohne eigentlich?
Dieser Fachartikel berechnet mit wissenschaftlichen Methoden die maximale Reichweite sowie weitere Flugdaten wie Antriebsleistung, Luftwiderstand und aerodynamische Besonderheiten. In diesem Artikel geht es nicht um die maximale Reichweite der Fernsteuerung, sondern um die maximale Flugreichweite bzw. Flugstrecke der Drohne.
Grenzen der maximalen Reichweite (Limits)
Um die Reichweite der Drohne zu ermitteln, ist es wichtig die limitierenden Faktoren zu kennen. Diese sind:- Akkukapazität
- Abfluggewicht
- Luftwiderstand und Aerodynamik
- Wirkungsgrad des Antriebssystems
Folgende Überlegung lässt vermuten, dass es eine optimale Transportgeschwindigkeit gibt:
- Bewegt sich die Drohne langsam fort, wird die meiste Energie für den Schwebeflug benötigt. Der Luftwiderstand der Drohne spielt keine Rolle.
- Fliegt die Drohne sehr schnell, überwiegt der Luftwiderstand. Die Kraft des Luftwiderstands steigt quadratisch mit der Fluggeschwindigkeit. Die dafür notwendige Leistung mit der dritten Potenz. Eine doppelt so schnell fliegende Drohne benötigt etwa die 8-fache Leistung. Dies trifft übrigens auch auf ein Auto bzw. Flugzeug zu.
Im Fall 1 wird die meiste Energie für den Schwebeflug benötigt und in Fall 2 für die Überwindung des Luftwiderstandes. Irgendwo dazwischen wird es eine optimale Fluggeschwindigkeit für eine maximale Flugreichweite geben.
Berechnung der Leistung für den Schwebeflug
Für den Schwebeflug sind die Leistungsaufnahmen hinreichend genau untersucht. Es gibt dazu zahlreiche praktische Messwerte von unterschiedlichsten Drohnen und deren Antriebssystemen. Der Leistungsbedarf für den Schwebeflug ist ein einfach zu ermittelnder Messwert. Entweder über ein Leistungsmessgerät im Flug oder nach einem längeren Schwebeflug über die verbrauchte Akkuenergie. Diese kann beispielsweise über das Ladegerät ermittelt werden.
I_Ladegerät * t_Ladegerät sind im obigen Beispiel 2 Ah oder 2000 mAh.
Formel für die Leistung bei Horizontalflug
Der Energiebedarf um den Quadrocopter in der Luft zu halten steigt mit steigender Fluggeschwindigkeit an. Nicht nur der Strömungswiderstand muss überwunden werden und kostet Energie. Eine weitere Besonderheit kommt bei einer typischen Drohne hinzu, da die Form ab einer gewissen Geschwindigkeit aerodynamisch wirksam wird.Abtrieb aufgrund der Form
Der DJI Phantom 3 professional und ähnliche Drohnen sind eher flach aufgebaut. Stellen Sie sich ein Brett vor, das sich durch die Luft bewegen. Ist das Brett parallel zum Boden im Schwebeflug ausgerichtet, ist der horizontale Luftwiderstand sehr gering. Wenn Sie wie bei einer Drohne üblich die Nase des Brettes neigen um den Vorwärtsflug einzuleiten, sieht die Sache anders aus. Das Brett wird aerodynamisch wirksam und wirkt ähnlich wie das Höhenruder eines Flächenmodells. Die Folge ist, dass die Drohne zusätzlich nach unten gedrückt wird.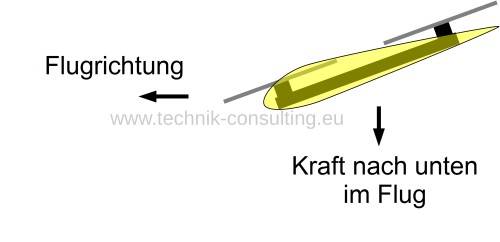
Skizze, wie der zusätzliche Abtrieb nach unten entsteht. Gelb ist schematisch ein Tragflügel eingezeichnet, welcher die Drohne repräsentiert.
Die meisten Copterpiloten kennen das Phänomen, wenn die Drohne bei hohen Geschwindigkeiten auf die andere Seite gelegt wird. Die Drohne steigt auf, obwohl der Winkel zur Horizontalen vielleicht gleich ist, nur auf der anderen Seite. Erfahrene Piloten nehmen beim Tiefflug kurz vor dem Kippen das Gas zurück, damit die Drohne auf einer Linie umdreht und nicht aufsteigt. FPV-Piloten (Videoflug), die mit hoher Geschwindigkeit unterwegs sind, nehmen intuitiv beim „Bremsen“ bzw. Kippen das Gas zurück.
Formel für die Berechnung Abtrieb durch die Form
Der cw-Wert als auch der ca-Wert ändern sich mit dem Anstellwinkel Alpha (Schwebeflug entspricht 0°, maximaler Vorwärtsflug 90°). Die Änderung des cw-Wertes mit dem Anstellwinkel kann vernachlässigt werden. Der cw-Wert ist ein Maß, wie windschlüpfig die Drohne ist. Kleine cw-Werte kennzeichnen eine stromlinienförmiges Drohne. Der ca-Wert beschreibt wie stark der Auftrieb bzw. Abtrieb ist. Je größer der ca-Wert, umso stärker.Folgende Näherungsformel wird für die weitere Berechnung verwendet:
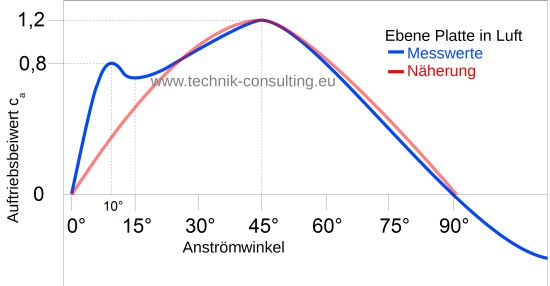
Im Diagramm ist erkenntlich, dass bei der Näherungsformel zwischen 0° und 20° große Abweichungen zu gemessenen Werten bestehen. Die Ursache liegt am Übergang von einer laminaren Strömung bei geringen Anstellwinkeln zur turbulenten Strömung bei größeren Anstellwinkeln ab ca. 10°. Der Luftwiderstand und die Gefahr eines Strömungsabrisses steigt bei größeren Anstellwinkeln stark an. Aus diesem Grund steuern Piloten Flugzeuge so, dass die Strömung im laminaren Bereich bleibt. Kunstflug ausgenommen. Bei einer Drohne ist die Struktur oft unterbrochen und entspricht nicht einem durchgehenden Tragflügel. Die Strömung ist zusätzlich durch die Anströmung der Propeller turbulent, weswegen die Näherungsformel auch bei kleinen Anstellwinkeln geeignet ist.
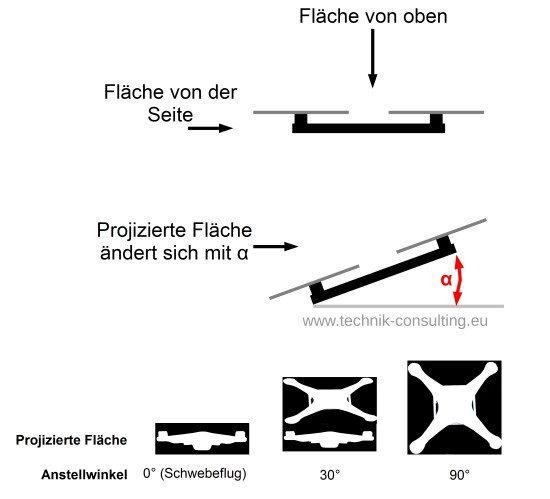
Bei einer Drohne ist es völlig egal, ob ein Strömungsabriss am Rumpf auftritt. Eine Drohne benötigt keine Tragflächen mit laminarer Strömung (abgesehen vom Propeller) um in der Luft zu bleiben. Die aerodynamisch wirksamen Flächen sind bei einem Copter meistens von Nachteil. Auch die Gesamtfläche, die der Fahrtwind „sieht“ ändert sich mit dem Anstellwinkel.
Die Flächen lassen sich über Fotos und Bildverarbeitungsprogramme gut bestimmen. Am Beispiel des „DJI Phantom 3 Professional“ zeige ich Ihnen das Vorgehen.
Nehmen Sie ein Foto von oben auf und schneiden Sie die Propeller per Software weg. Messen Sie eine Ihnen bekannte Abmessung in Pixel aus. Ich habe den diagonalen Propellerabstand verwendet. Dieser ist 356 mm. In dem hoch aufgelösten Beispielbild sind dies 2011 Pixel. Somit entspricht ein Pixel 0,177 mm. Diesen Wert merken Sie sich.

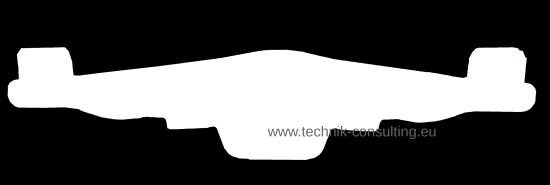
Anschließend bearbeiten Sie das Bild (z.B. mit Helligkeit und Kontrast) bis die Fläche von oben weiß erscheint und der Rest schwarz.
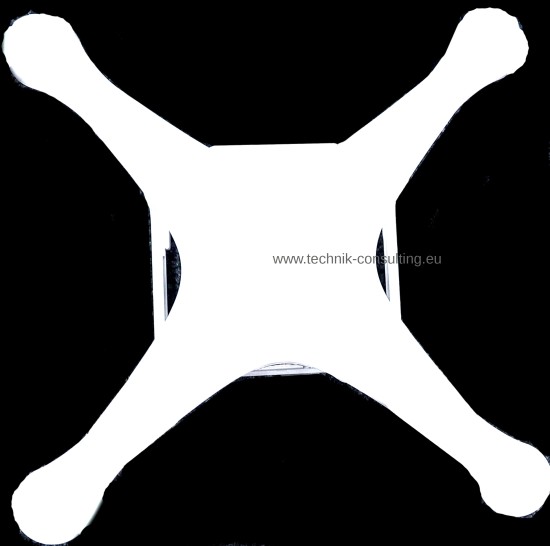
Dies ist die projizierte Fläche von oben. In dem Histogramm können Sie die Anzahl der weißen und schwarzen Pixel bestimmen. In dem hoch aufgelösten Beispielbild sind 975.265 weiße Pixel enthalten. Ein Pixel entspricht einer Fläche von 0,177 x 0,177 mm2 = 0,031 mm2. Multiplizieren Sie diesen Wert mit der Anzahl der weißen Pixel und schon haben Sie die Fläche. Die von oben projizierte Fläche des „DJI Phantom 3 professional“ ist 306 cm2.
Durch den Aufbau wird eine typische Drohne bei höheren Geschwindigkeiten nach unten gedrückt. Die Drohne wirkt wie eine kleine Tragfläche bzw. ein Höhenruder und drückt das Flugmodell nach unten. Diese Abtriebskraft lässt sich näherungsweise berechnen mit:
Rho: Dichte der Luft. Auf Meereshöhe bei 20°C ca. 1,2 kg/m3.
c_a,0 ist der Maximalwert, den die Drohne mit der von oben projizierten Fläche A_oben erreichen kann. Bei einer ebenen Platte ist der Auftriebsbeiwert c_a etwa 1,2.
Zusätzlich benötigte Motorenleistung wegen Abtrieb
Um diese Kraft nach unten zu kompensieren wird folgende Motorleistung zusätzlich benötigt:
Die Drohne muss nicht nur gegen den Abtrieb die entsprechende Leistung aufbringen, um in der Luft zu bleiben. Auch der Strömungswiderstand muss überwunden werden. Eta_Schub ist in der Einheit „Kraft pro Watt“.
Berechnung Motorleistung wegen Luftwiderstand
Nachdem die Leistung für den Schwebeflug und die Leistung zur Überwindung des Abtriebs betrachtet wurde, wird nun in isolierter Weise die Leistungsaufnahme in Bezug auf den Luftwiderstand bestimmt. Es geht hierbei nur um die Überwindung des Luftwiderstandes. Bei einem Flächenmodell lässt sich der Luftwiderstand recht einfach über den Zusammenhang von Fläche, cw-Wert und Geschwindigkeit berechnen.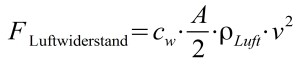
Bei einer Drohne ist dies nicht ganz so einfach, da sich die angeströmte Fläche ändert. Ein langsam fliegender Copter wird nur wenig gekippt. Deswegen zeigt vorwiegend die Schmalseite in Flugrichtung.
„DJI Phantom 3 professional“ ohne Gimbal, Kamera, Landegestell und Propeller. Dies wäre die minimale projizierte Fläche von vorne. Die Propeller werden dabei nicht berücksichtigt und sind deshalb entfernt. Diese Drohne hat jetzt einen um 32 % geringeren Luftwiderstand von vorne.
Ausgemessen ist diese Fläche 105 cm2. Die Fläche für Gimbal, Kamera und Landegestell beträgt ca. 34 cm2.
Bei hohen Fluggeschwindigkeiten und großem Kippwinkel, zeigt immer mehr von der Oberseite in Flugrichtung. Bei den meisten Drohnen vergrößert sich deshalb die Fläche.
A_seite: Dies ist die Seitenfläche der Drohne
A_oben: Dies ist die Oberseite der Drohne
Diese Formel beschreibt die projizierte Fläche in Flugrichtung. Damit lässt sich die Leistung zur Überwindung des Strömungswiderstandes angeben:

Dies ist die Leistung bei einem Wirkungsgrad von 100%.
Der cw-Wert ändert sich ebenfalls mit dem Anstellwinkel je nach Drohne. Dies wird hier nicht weiter betrachtet. Es wird in diesem Fachartikel ein mittlerer cw-Wert verwendet.

Um die real benötigte Leistung zur Überwindung der Luftreibung bzw. des Luftwiderstands zu erhalten, muss der Wirkungsgrad des Antriebs mit einbezogen werden. Dieser ändert sich mit der Fluggeschwindigkeit, was in diesem Fachartikel der Einfachheit halber nicht berücksichtigt wird. Typischerweise liegt der Wirkungsgrad des Antriebs bei höheren Geschwindigkeiten bei ca. 60 %.
Gesamtleistung bei hohen Fluggeschwindigkeiten
Für die Berechnung der Gesamtleistung sind nun alle Einzelleistungen durch entsprechende Formeln berechenbar. Die isolierten Teilleistungen sind:- Zusätzliche Motorenleistung wegen Abtrieb
- Luftwiderstand
- Schwebeflug
Die Formel für die Gesamtleistung ergibt sich damit zu:

Um die Formel ausrechnen zu können muss der Winkel Alpha bei der Geschwindigkeit v bekannt sein. Sie ahnen es schon. Auch dieser lässt sich berechnen.
Quadrocopter Anstellwinkel im Flug
Werden die Kräfte im Flug einer Drohne betrachtet, so ergibt sich folgendes Bild: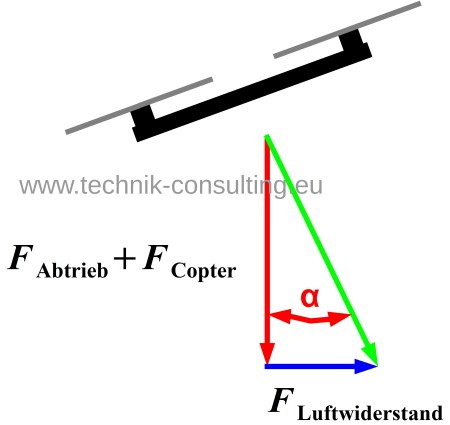
Skizze der Kräfte während des Fluges.
Flugrichtung nach links.
F_Copter entspricht der Gewichtskraft der gesamten Drohne (m * g).
Der Winkel Alpha lässt sich bestimmen über den Tangens.
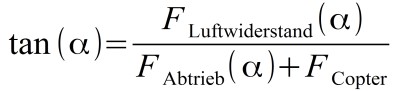

Diese Formel sieht komplizierter aus, als diese ist. Wichtig ist zu erkennen, dass die Formel für den Anstellwinkel im Flug nur v und alpha als Unbekannte besitzt. Alle anderen Variablen sind bekannt. Damit lässt sich die Abhängigkeit von alpha gegenüber v berechnen.
Berechnung der Daten mittels Algorithmus
Um die benötigten Werte zu erhalten wird folgender Algorithmus angewendet.- Alpha wird gesetzt mit einem Startwert (z.B. 0°)
- v wird bestimmt
- Mit Alpha und v lässt sich die Gesamtleistung für diesen Flugzustand berechnen
- Alpha erhöhen um z.B. 1° und zurück zu Punkt 1, bis Alpha 90° erreicht hat.
Ergebnisse für die maximale Flugstrecke Drohne
Mit den oben erklärten Formeln ist die Grundlage gelegt, um folgende Daten einer Drohne zu berechnen:- Kippwinkel in Abhängigkeit der Geschwindigkeit
- Leistung in Abhängigkeit der Geschwindigkeit
- Maximale Reichweite im Flug
Kippwinkel „DJI Phantom 3 professional“ in Abhängigkeit der Geschwindigkeit
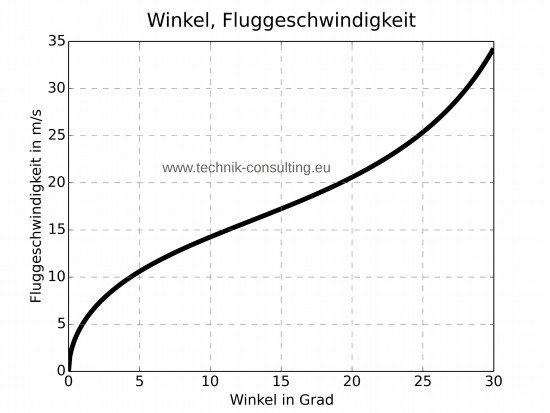
Die Fluggeschwindigkeit steigt ab einem Kippwinkel von über 20 Grad stark an.
„DJI Phantom 3 professional“ Antriebsleistung gesamt
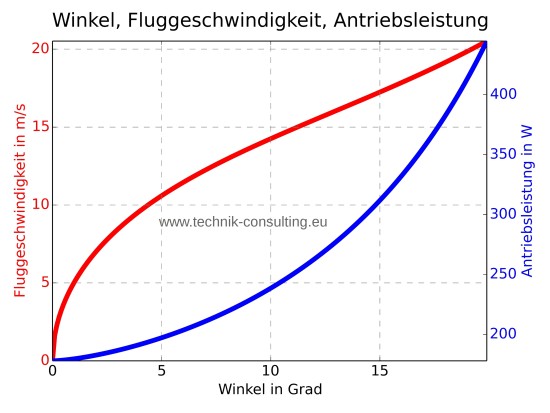
Die blaue Kurve stellt die nötige Antriebsleistung bei der Fluggeschwindigkeit (rote Kurve) dar. Unten ist in der Grafik der Anströmwinkel bzw. Kippwinkel aufgetragen. Beim „DJI Phantom 3 professional“ beträgt die maximale Motorleistung ca. 400 W. Damit ist eine Fluggeschwindigkeit von etwa 17 m/s möglich.
Bei einem Winkel von 12° gegenüber dem Schwebeflug erreicht der „DJI Phantom 3 professional“ eine Geschwindigkeit von 15 m/s. Dies entspricht 54 km/h.
„DJI Phantom 3 professional“ Antriebsleistung – aufgeschlüsselt
Die Gesamtleistung in Abhängigkeit der Fluggeschwindigkeit ist bekannt. Die Einzelleistungen werden dargestellt, um einen besseren Überblick zu erhalten, wo die Antriebsenergie verbraucht wird.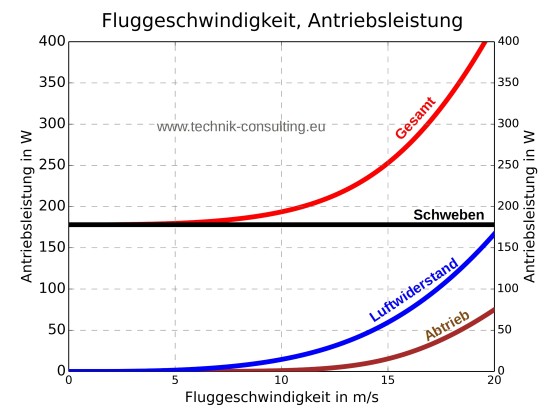
Der Luftwiderstand und Abtrieb werden erst bei höheren Geschwindigkeiten einen merklichen Beitrag zum Gesamtverbrauch leisten. Optimierungen in diesem Bereich sind nur erforderlich, wenn Geschwindigkeiten von mehr als 10 m/s (36 km/h) dauerhaft geflogen werden. Die meiste Energie wird für den Schwebeflug verbraucht. Für lange Flugzeiten bei niedrigen Geschwindigkeiten ist damit die Optimierung des Schwebeflugs am sinnvollsten.
„DJI Phantom 3 professional“ maximale Reichweite
Welche Strecke kann der „DJI Phantom 3 professional“ maximal zurücklegen? Mit dem Formelsatz von oben ist die Berechnung durchführbar.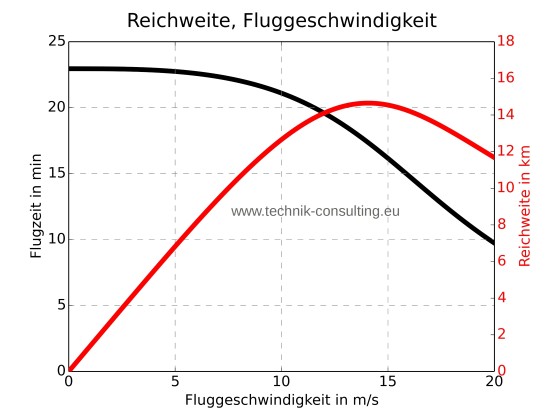
Je schneller der „DJI Phantom 3 professional“ geflogen wird, umso geringer ist die Flugzeit. Dieser Zusammenhang ist plausibel, da zusätzlich Energie für die Überwindung des Luftwiderstandes aufgebracht werden muss. Da die Leistung zur Überwindung des Luftwiderstandes mit der dritten Potenz (hoch 3) ansteigt (doppelte Geschwindigkeit ? 8 fache Leistung) sind der Geschwindigkeit Grenzen gesetzt. Fliegt die Drohne sehr langsam, wird die meiste Akkuenergie für den Schwebeflug verbraucht. Für einen Streckenflug nicht optimal.
Die rote Kurve im Diagramm stellt die maximale Reichweite dar, die der „DJI Phantom 3 professional“ mit einer Standard-Akkuladung zurücklegen kann. Das Maximum ist bei ca. 14 m/s und entspricht 50 km/h. Damit haben die Entwickler von DJI die Begrenzung der maximalen Geschwindigkeit von 16 m/s sinnvoll festgelegt. Höhere Geschwindigkeiten würden die Reichweite deutlich reduzieren.
Bei der optimalen Reisegeschwindigkeit des „DJI Phantom 3 professional“ von ca. 14 m/s beträgt die Flugzeit ca. 17 Minuten und die maximale Reichweite gut 14 km.
Optimierung der Reichweite beim „DJI Phantom 3 professional“
Wird das Gimbal mit der Kamera entfernt, beträgt die maximale Reichweite ca. 16 km. Dies entspricht einem Streckengewinn von 14%.Wenn Sie Quadrocopter entwickeln und Hilfe bei der Auslegung der Komponenten und Optimierung benötigen, so können Sie mich gerne ansprechen.
Um diesen Fachartikel übersichtlicher zu gestalten wurden unter anderem folgende Dinge nicht berücksichtigt:
- Die Leistung für den Schwebeflug ändert sich mit der Geschwindigkeit, da sich der Wirkungsgrad mit der Fluggeschwindigkeit ändert.
- ca und cw sind winkelabhängig.
- Der Wirkungsgrad für den Antrieb ändert sich mit der Fluggeschwindigkeit
- Bei langsamem Vorwärtsflug reduziert sich der Leistungsbedarf für den Schwebeflug durch den Translationsauftrieb (engl. „translational lift“).

Sollten Sie detailliertere Berechnungen benötigen, bitte melden.. Für Fragen zur Durchführung, Optimierung oder Berechnung von Langstreckenflügen stehe ich Ihnen gerne zur Verfügung.