Stabile Drohne im Schwebeflug und Flug
Drohnen fliegen nicht eigenstabil, wie etwa ein Fallschirm. Dieser Fachartikel gibt Einblicke in die Theorie und Praxis der stabilen Fluglage und zahlreiche Möglichkeiten der Optimierung des Flugmodells.

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Ursachen einer stabilen Fluglage
Wenn Sie ein Blatt Papier fallen lassen, wird es in den meisten Fällen unkontrolliert zu Boden fallen. Falten Sie jedoch einen Papierflieger daraus, fliegt das Flugzeug kontrolliert zu Boden. Dies hat mit dem Schwerpunkt und Tragflächen zu tun. Je tiefer der Schwerpunkt, um so stabiler fliegt das Flugzeug, aber auch um so träger reagiert dieses bei Richtungsänderungen. Vergleichen Sie hierzu die Flugeigenschaften eines Fallschirms (tiefer Schwerpunkt) mit denen eines Segelflugzeugs.Eine Drohne ist instabil
Ein Quadrocopter ist aufgrund folgender Tatsachen nicht eigenstabil (bis auf konstruierte Ausnahmen) bzw. kann ohne Elektronik keine stabile Fluglage einnehmen:- Hoher Schwerpunkt
- Geringes Trägheitsmoment
- Hohe Windanfälligkeit
Sensoren
Die Sensorik eines besseren Quadrocopters liefert Informationen über Beschleunigung, Neigung, Drehrate und Luftdruck. Mit diesen Informationen erhält die Elektronik wichtige Daten zur Fluglage. Eine Steuerelektronik versucht mit den Motoren die gewünschte Fluglage zu halten. Dank immer besserer Regelungstechnik ist es so möglich auch extrem instabile Modelle stabil in der Luft zu halten.Warum ist eine Drohne stabil?
Wie stabil ein Modell in der Luft fliegt hängt zusammen mit:So kann das Modell die beste Regelelektronik, Antrieb und Sensorik besitzen und ist trotzdem nicht stabil zu fliegen. Denken Sie etwa an den krassen Fehler bei einer Drohne, wenn an einer Seite beide Luftschrauben rechtsdrehend sind, anstatt diagonal angeordnet zu sein. Solche Fehler sind leider schon passiert und wenn das Modell in der Hand versucht wird zu starten, passieren schwere Verletzungen, da die Regelung in dieser falschen Anordnung das Modell zu stabilisieren versucht.
Für viele Anwendungen ist es sehr wichtig eine maximal stabile Drohne zu haben. Stellen Sie sich Filmaufnahmen auf einer stark schwankenden Drohne vor. Das Ergebnis ist nicht verwertbar, wenn Sie nicht einen guten Gimbal einsetzen.
Doch was macht das Modell letztlich stabil? Bevor wir diese Frage beantworten können müssen die wichtigsten Komponenten betrachtet werden.
Der Antrieb einer Drohne
Beginnen wir mit dem Antrieb.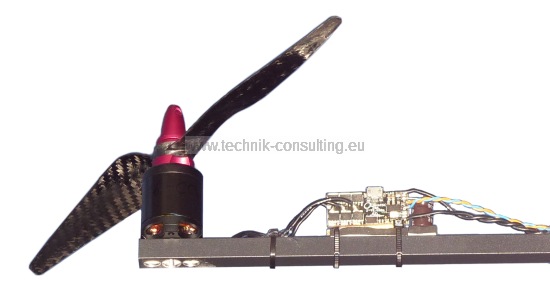
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Dieser enthält folgende Komponenten
Für die Stabilität ist letzten Endes wichtig, wie schnell und präzise die Drehzahl des Propellers geändert werden kann. Um die Drehzahl zu ändern muss bei einer Erhöhung der Drehzahl dem Motor Energie zugeführt werden und bei einer Senkung der Drehzahl (=Bremsen) Energie abgeführt werden. Je mehr Leistung der Regler bzw. Motor besitzt, um so schneller kann die Drehzahl geändert werden.
Je geringer das Trägheitsmoment des Systems Motor und Propeller, um so schneller wird, bei gleicher Ansteuerleistung, die Drehzahl geändert.
Das Trägheitsmoment setzt sich bei einem bürstenlosen Außenläufer zusammen aus:
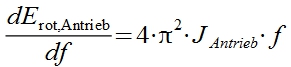
Die Energie der Antriebs-Drehbewegung ist:

f: Drehzahl in 1/s
PI: Kreiszahl
J_Antrieb: Trägheitsmoment Antrieb (Propeller + Motor + Befestigung)
Energie für Antriebs-Drehzahländerung
f: Drehzahl in 1/s
df: Drehzahländerung in 1/s
J_Antrieb: Trägheitsmoment Antrieb (Propeller + Motor + Befestigung)
PI: Kreiszahl
Diese Formel gibt an, wie viel Energie (dE) notwendig ist, um eine Drehzahländerung von df zu bewirken.
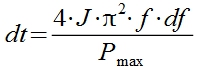
Drehzahländerung mit Maximalleistung

P_max: Maximalleistung Motor
f: Drehzahl in 1/s
df: Drehzahländerung in 1/s
dt: Zeit in s
J_Antrieb: Trägheitsmoment Antrieb (Propeller + Motor + Befestigung)
PI: Kreiszahl
Zeit für Drehzahländerung bei gegebener Leistung
Zeit für Drehzahländerung bei gegebener Leistung mit df = 0,1 f. Dies entspricht etwa der Stellgröße beim Schwebeflug.
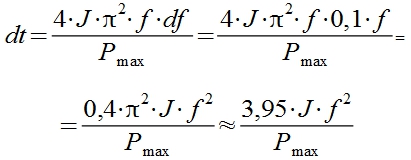
Regelzeit des Antriebs
10% entspricht dem typischen Drehzahlbereich einer Drohne im Schwebeflug.Achtung: Je nach Reglerverhalten ist in der Realität diese Zeit erheblich größer. Die theoretisch angegebene Zeit stellt das Minimum dar. Die Motorregler sind im Vergleich zu den mechanischen Komponenten deutlich schneller und werden nicht weiter betrachtet. Lediglich die Leistung des Motorreglers muss zum Motor passen.
Bei einer mittelgroßen Drohne ergeben sich folgende Werte für die Trägheitsmomente:
- Trägheitsmoment einer 11" Carbon Luftschraube: 5,7 E-05 kg*m2
- Trägheitsmoment eines 2216 Motors incl. Befestigung: 5,0 E-06 kg*m2
- Gesamtes Trägheitsmoment: 6,2 E-06 kg*m2
Berechnung der Regelzeit des Antriebs
Die Zeit um die Drehzahl bei 5000 1/min um 10% zu verändern bei Einsatz eines 20A Reglers und einem 3s Akku (ca. 200 W) beträgt mit dem 11 Zoll Propeller 8,5 ms. Wird ein 8 Zoll Propeller eingesetzt beträgt werden nur noch 3,3 ms benötigt.Diese Zeit ist für die spätere Betrachtung wichtig und wird t10% genannt.
Sensoren einer Drohne
Sensoren sind für die Drohne erforderlich, um die genaue Fluglage zu erkennen. Eine bessere Drohne verfügt über folgende, für die Fluglage wichtige, Sensoren:- Beschleunigung in 3 Achsen
- Drehrate in 3 Achsen
- Luftdruck
- Magnetfeld (Kompass) in 3 Achsen
In der folgenden Tabelle sind die typischen Ansprechzeiten und Empfindlichkeiten der Sensoren in Verbindung mit einem 12 bit-AD-Wandler angegeben:
| Sensor | Ansprechzeit | Empfindlichkeit |
|---|---|---|
| Beschleunigung | 2 ms | 15 mV / (m/s2) ca. 0,07 m/(s2) |
| Luftdruck | 1 ms | 30 mV / kPa, ca. 3 m |
| Drehrate | 1 ms | 10 mV /(°s) |
| Magnetfeld | 1 ms | 1 mGs |
Tabelle - Ansprechzeiten und Empfindlichkeiten der Sensoren
Verglichen mit der Stellzeit des Antriebs (ca. 5 ms) sind die Ansprechzeiten der Sensoren gering.
Regelkreis Geschwindigkeit
Die Sensordaten werden dem Regelkreis zur Verfügung gestellt. Der Regelkreis besteht fast ausschließlich aus Software in einem Mikrocontroller. Heutige Systeme erreichen etwa 200 Sensorauswertungen pro Sekunde (ca. 5 ms).Damit sind der Antrieb und die Sensorauswertung die langsamsten Komponenten.
Die Konfiguration
Drohnen lassen sich in unterschiedlichster Weise aufbauen. Sollen Luftaufnahmen mit Gimbal angefertigt werden, ist der Schwerpunkt einer solchen Drohne deutlich unterhalb der Propellerebene. Dadurch lässt sich die Drohne schlechter drehen.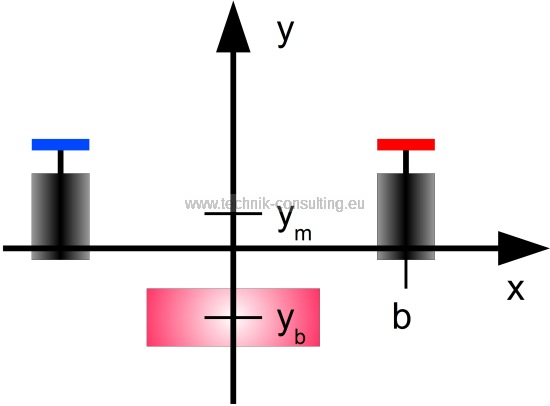
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
In dieser Skizze ist eine Drohne schematisch dargestellt in der Seitenansicht. Der Schwerpunkt der Drohne befindet sich bei y = 0. Der Schwerpunkt eines Motors befindet sich auf ym und der Schwerpunkt des Akkus bei yb. Weitere Komponenten wie Mechanik und Elektronik werden nicht betrachtet. Verglichen mit den Motoren oder Akku liefern diese einen geringen Beitrag zu dem Gesamtdrehmoment des Modells. Bei Bedarf lassen sich diese jedoch zu dem Motor oder Akku hinzurechnen.
Trägheitsmoment Drohne
Damit ergibt sich das Trägheitsmoment einer Drohne zu:m_m: Masse Antrieb (Motor + Propeller + Befestigung)
y_m: Abstand Antriebsschwerpunkt von dem Modellschwerpunkt
y_b: Abstand Akkuschwerpunkt von dem Modellschwerpunkt
Je geringer das Trägheitsmoment der Drohne ist, um so leichter lässt er sich drehen.
Dies bedeutet nicht, dass eine Drohne mit sehr hohem Schwerpunkt sich schnell drehen lässt. Das Trägheitsmoment ist bei so einer Konfiguration nicht mehr am kleinsten. Solche Drohnen sind lediglich besonders instabil.
Die Formel für das Gesamtträgheitsmoment ist bis auf die Variable b nachvollziehbar. Denn wenn b sehr klein ist, ist zwar das Gesamtdrehmoment klein, aber gleichzeitig können die Motoren dann nur ein geringes Drehmoment in das Flugmodell einbringen.
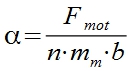
Winkelbeschleunigung Drohne
Eine bessere Aussage liefert die Winkelbeschleunigung. Je größer diese ist, um so schneller kann sich das Modell selbst in Drehbewegung versetzen.
b: Abstand Motorachse zu Modellachse
n: Anzahl der Motoren
F_mot: Schubkraft eines Motors für die Drehung. Werden mehrere Motoren gleichzeitig für die Drehung eingesetzt, diesen Wert entsprechend multiplizieren.
m_m: Masse Antrieb (Motor + Propeller + Befestigung)
y_m: Abstand Antriebsschwerpunkt von dem Modellschwerpunkt
y_b: Abstand Akkuschwerpunkt von dem Modellschwerpunkt
Wenn sich die Komponenten (Motor und Batterie) genau in der Mitte am Schwerpunkt (yp = yb = 0) befinden, lässt sich die Formel vereinfachen zu:
Ideale Anordnung der Komponenten
Wenn ein Modell gebaut werden soll, welches sich möglichst schnell drehen lässt, sind neben leichten Motoren und Propellern (bei gleicher Leistung) auch möglichst kleine Abstände von der Mittelachse anzustreben. Im Idealfall befindet sich der Schwerpunkt des Modells in Rotorebene.Werte eine agilen Modells sind:
Fmot = 2 * 20 N (2 Motoren laufen gleichzeitig für eine Drehung)
Mm = 0,1 kg
B = 0,2 m
Dieses Modell benötigt aus der Ruhe etwa 0,1 s um einen Winkel von 10° zurückzulegen. Für eine komplette Umdrehung (eine halbe Umdrehung Beschleunigen und eine halbe Umdrehung Bremsen) wird etwa 1 s benötigt.
Umkippen einer Drohne bei zu hohem Schwerpunkt
Bei sehr ungünstiger Schwerpunktlage und Konfiguration kann ein Modell nicht mehr stabilisiert werden und kippt um. Dieser Effekt kann bei Modellen mit sehr hohem Schwerpunkt auftreten oder bei Modellen mit sehr tiefem Schwerpunkt, welche auf den Rücken gedreht werden (wodurch der Schwerpunkt wieder sehr hoch ist). Stellen Sie sich hier eine Drohne mit einer schwerer Kamera im Rückenflug vor. Bei falscher Auslegung kippt ab einem gewissen Winkel das Modell unweigerlich um.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Animation Drohne kippt um
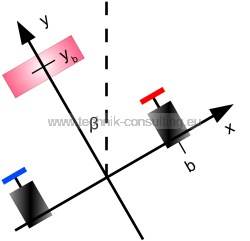
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Skizze stabile Drohne Umkippen
Stabilitätskriterium Umkippen
Im Idealfall kann sich das Modell aus jeder Fluglage wieder stabilisieren. Damit dies gelingt, muss das Drehmoment, welches die Motoren erzeugen, immer größer sein als schwerkraftbedingte Drehmomente. Aerodynamisch wirkende Drehmomente bei schnellen Flügen werden hier nicht betrachtet.Daraus ergibt sich folgendes Stabilitätskriterium
Drehmoment Antrieb > Schwerkraftbedingtes Drehmoment
Maximalen Kippwinkel berechnen
Der Winkel ab dem das Modell unweigerlich abkippt lässt sich berechnen mit:und daraus
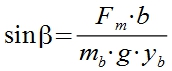
Diese Formel ist nur gültig, wenn die rechte Seite kleiner gleich 1. Wenn größer 1 ist das Modell aus jeder Fluglage stabilisierbar.
b: Abstand Motorachse zu Modellachse
F_m: Schubkraft eines Motors für die Drehung. Werden mehrere Motoren gleichzeitig für die Drehung eingesetzt, diesen Wert entsprechend multiplizieren.
m_b: Masse über dem Schwerpunkt z.B. Akkugewicht bei Rückenflug.
g: Fallbeschleunigung
y_b: Abstand Akkuschwerpunkt von dem Modellschwerpunkt
Ab dem Winkel beta fängt sich das Modell unweigerlich zu drehen an und kann mit der gegebenen Schubkraft nicht mehr stabilisiert werden. Lässt sich die Schubkraft nicht erhöhen oder das Modell in der anderen Lage stabil fliegen, stürzt es ab.
Eine stabile Drohne
Ein stabiles Modell (=bleibt in der Luft) besteht ausKippwinkel größer als etwa 60 °.
Regelkreis und Antrieb schneller als t10°. --> t10%<t10°.
Eine sehr stabile Drohne
Ein sehr stabiles und agiles Modell besitzt folgende EigenschaftenDrehmoment Motoren > Schwerkraftbedingtes Drehmoment
(Modell kann sich aus jeder Fluglage aufrichten)
Alpha sehr groß d.h. starker Antrieb, Propeller so nahe wie möglich in der Mittelachse des Modells und alle schwereren Teile (z.b. Akku) sind in der Propellerebene angeordnet.
Regelkreis und Antrieb deutlich schneller als t10° (t10%<<t10°).

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Drohne optimiert
Anhang - Trägheitsmoment Propeller ermitteln
Um das Trägheitsmoment eines Propeller zu ermitteln wird dieser schrittweise zerschnitten, gewogen und vermessen.
Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Trägheitsmoment Propeller
Jedes Propellerstück liefert gemäß der Formel dJ = R2 * dm einen Beitrag zum gesamten Trägheitsmoment. Nach Aufsummieren aller Propellerstücke ist das Trägheitsmoment bekannt. Bei dem dargestellten 11 Zoll Propeller aus Carbon beträgt das gesamte Trägheitsmoment: 5,7 E-05 kg*m2. Ein 8 Zoll Propeller hat zum Vergleich ein Trägheitsmoment von 1,9 E-05 kg*m2.
Anhang - Trägheitsmoment Motor und Befestigung

Foto: Dirk Brunner; Lizenz: CC BY SA 3.0
Trägheitsmomente Antrieb
Alle Trägheitsmomente eines typischen 2216 Motors incl. Befestigung betragen zusammen 5,0 E-06 kg*m2 und damit gerade einmal 10% des Trägheitsmoments des 11 Zoll Propellers.
Weitere Analysen
 Wenn Sie Analysen für andere Modelle benötigen, stehe ich Ihnen gerne zur Verfügung.
Wenn Sie Analysen für andere Modelle benötigen, stehe ich Ihnen gerne zur Verfügung.